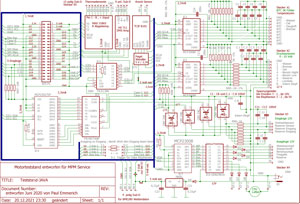
Fotos von Platine Motorteststand
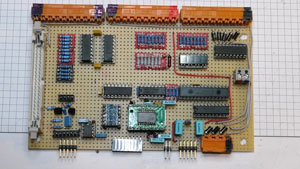
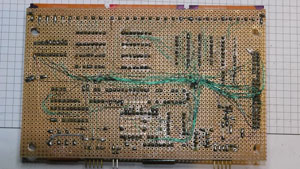
Verbindung Raspberry zum Motorteststand wurde mit einem 40 pol. Floppykabel gemacht.
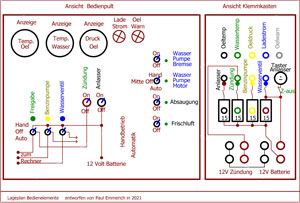
Schaltpläne der Motorsteuerung ( Interface und Elektroplan ) und Bedienpult / Klemmkasten


.
Die Ausgänge der Interfaceplatine steuern 12 Volt Relais und diese dann die 220 Volt Pumpen oder 12 Volt Ventile .
Die Relais befinden sich in einem weiteren
Montagegehäuse mit Hutschienen , Sicherungen und einem 12 Volt Netzteil.
Relais sind für Hutschienenmontage mit eingebauter LED-Anzeige und Freilaufdiode .
Desweiteren ist ein Klemmkasten in der nähe des Motors vorhanden.


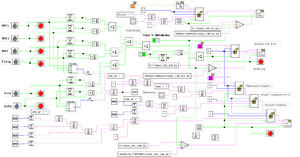
Schaltpläne der Klopferkennung und Beschreibung.


.
Die Klopferkennung arbeitet mit dem IC von Texas Instruments " TPIC8101 Knock Sensor Interface "
Es wird über einen Timer ein 4 ms Impuls gestartet dieser dann zum Interface gegeben zum Integrator Start.
Ein exakter Impuls ist mit den GPIO des Raspberry nicht möglich , daher der NE555.
Nach den 4ms stoppt der Integrator und es kann die erreichte Spannung ausgelesen werden.
Diese ist bei meinen Parametern ca 1 Volt , wenn vom Klopfsensor keine Spannungsimpulse gekommen sind.
Falls vom Klopfsensor innerhalb der 4ms Spannungsimpulse gekommen sind ,
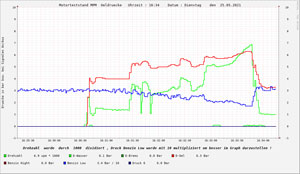
werden diese zur Integrationsspannung addiert und es kann der Klopfwert ermittelt werden. ( siehe Sreenschot )
Diese Spannunggröße kann bis 5 Volt betragen und wird mit einem AD Wandler eingelesen.
Vom Analogwert wird 1 Volt subtrahiert und und die Differenz bis 5 Volt in eine 10 Teilung aufgelößt.
Je nach Drehzahl des Motors haben wir eine bis 6 Integrationsflanken zum messen.
In meinem Beispiel hatten wir 5000 UPM , also 2 Integrationskuven und in der ersten sieht man den Anstieg
auf 1,5 Volt durch 2 Spannungswerte des Klopfsensors .
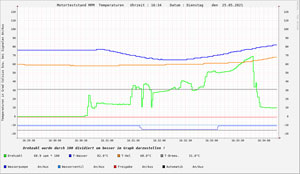
RRDtool (round-robin database tool) integriert , damit Graphen der Motordaten erstellt werden können.
Kann jetzt in der Eingabezeile gs(x) Graph Stunden 1 bis 9 , gm (x) 1 bis 99 = Graph Minuten eingeben werden.
Zur gleichen Zeit wird dan ein Diagramm nach Vorwahl ausgegeben.
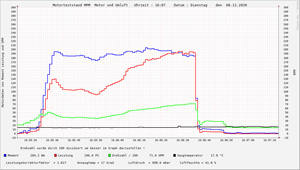
Dieses kann Temperaturren , Drücke , Abgastemperaturen oder Motordaten sein.
Bei allen Graphen wird immer die Drehzahl mit ausgegeben.
Motordaten können auch als XML-Datei ausgegeben werden , für dir Bearbeitung mit OpenOffice ( siehe folgende Bilder ) .
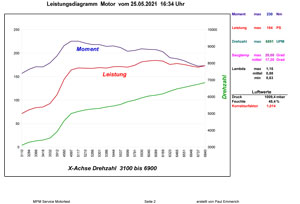
Jetzt ein 2. Diagramm nach Morordrehzahl mit einem eigenen Algorithmus erstellt
Die ermittelten Werte für Leistung wurden schon mit dem Luftkorrekturfaktor multipliziert.

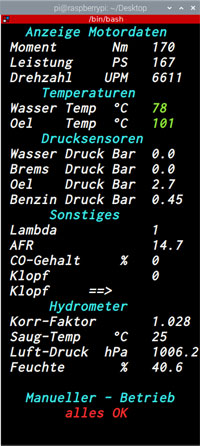
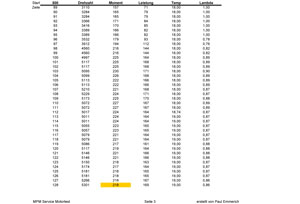
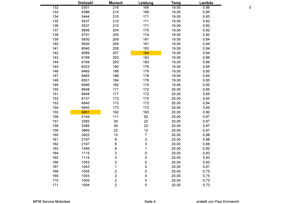
Motordaten von der XML-Datei werden auch als Liste ausgegeben.
Es sind die höchsten Werte von Drehzahl , Moment und Leistung gelb markiert.
Im Diagramm für Temperaturen sind die unteren drei Kennlinien die Pumpen als Digitalsignal dargestellt , in Wirklichkeit wird aber ein
Temperatursignal dargestellt mit der Differenz 0 bis 2 Kelvin mit Offset , damit ich diese im Graphen sehe.
Bei allen Diagrammen wird die Drehzahl immer mit angezeigt.